NavX
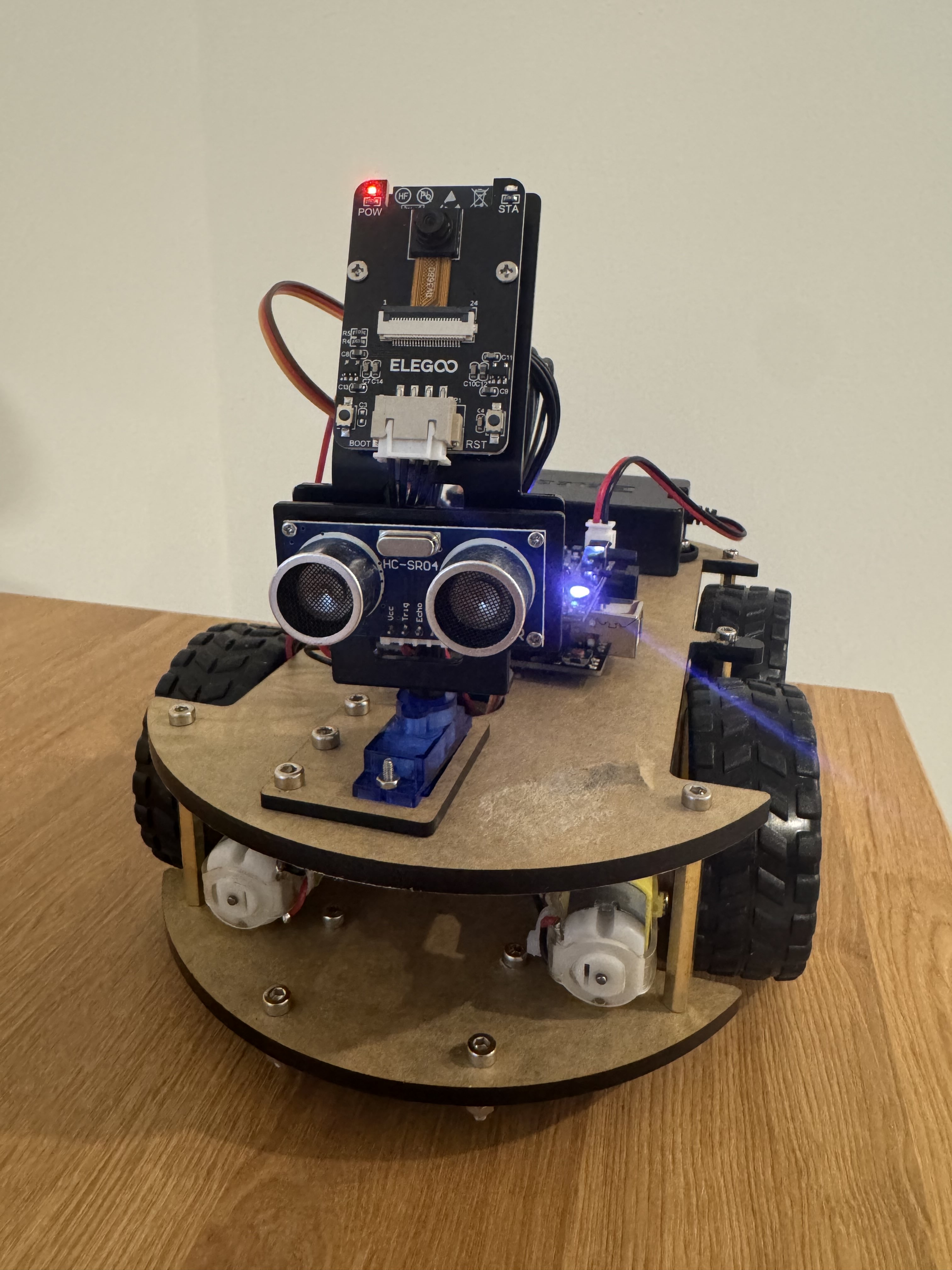
NavX is the current project I'm working on with a team of two other people, where we are assembling and programming an autonomous object avoidance robot car. The robot integrates various sensors and intelligent algorithms to enable real-time navigation. I’m actively developing and implementing obstacle detection and identification features, enhancing the robot’s ability to recognize and report objects blocking its path. This project is giving me hands-on experience with sensor fusion, real-time processing, and autonomous system design.